گیربکس ها
گیربکس یک وسیله مکانیکی است که برای افزایش گشتاور خروجی یا تغییر سرعت (RPM) موتور استفاده می شود. محور موتور به یک سر گیربکس متصل شده و از طریق پیکربندی داخلی چرخ دنده های یک گیربکس گشتاور خروجی و سرعت معینی را که با نسبت دنده تعیین می شود ، فراهم می کند.
گیربکس یک ماشین در سیستم انتقال قدرت است که کاربرد کنترل شده قدرت را فراهم می کند. اغلب اصطلاح گیربکس ۵ سرعته به سادگی به گیربکس اشاره دارد که از چرخ دنده ها و قطارهای دنده ای استفاده می کند تا سرعت و گشتاور را از منبع تغذیه چرخشی به دستگاه دیگر ارائه دهد.
اصطلاح گیربکس به درستی به کل پیشرانه ، از جمله کلاچ ، گیربکس ، محور محور (برای خودروهای دیفرانسیل عقب) ، دیفرانسیل و محورهای محرک نهایی اشاره دارد. در آمریکا این واژه گاهی در گفتارهای معمولی برای اشاره بیشتر به گیربکس به تنهایی استفاده می شود و استفاده دقیق از آن متفاوت است.
رایج ترین استفاده در وسایل نقلیه موتوری است ، جایی که گیربکس خروجی موتور احتراق داخلی را با چرخ های محرک سازگار می کند. چنین موتورهایی باید با سرعت چرخشی نسبتاً بالایی کار کنند که برای راه اندازی ، توقف و کندتر شدن سفر مناسب نیست. این گیربکس سرعت بیشتر موتور را به سرعت چرخها کاهش می دهد و گشتاور را افزایش می دهد. گیربکس ها همچنین در دوچرخه های پدالی ، ماشین های ثابت و در جایی که سرعت و گشتاورهای مختلف چرخشی متناسب است ، استفاده می شود.

غالباً یک گیربکس دارای نسبت دنده های متعدد (یا به سادگی “دنده”) با قابلیت تغییر بین آنها با تغییر سرعت است. این تعویض ممکن است به صورت دستی (توسط اپراتور) یا به طور خودکار (توسط یک واحد کنترل) انجام شود. کنترل جهت دار (جلو و عقب) نیز ممکن است ارائه شود. گیربکس های تک نسبت نیز وجود دارند که به سادگی سرعت و گشتاور (و گاهی جهت) خروجی موتور را تغییر می دهند.
در وسایل نقلیه موتوری ، گیربکس به طور کلی به میل لنگ موتور از طریق فلایویل یا کلاچ یا کوپلینگ مایع متصل می شود ، تا حدی به این دلیل که موتورهای احتراق داخلی نمی توانند زیر سرعت خاصی کار کنند. خروجی گیربکس از طریق محور محرک به یک یا چند دیفرانسیل منتقل می شود که چرخ ها را به حرکت در می آورند.
در حالی که یک دیفرانسیل ممکن است کاهش دنده را نیز ایجاد کند ، هدف اصلی آن این است که اجازه دهد چرخ ها در دو سر یک محور با سرعت های مختلف بچرخند (برای جلوگیری از لغزش چرخ در پیچ ها) ضروری است زیرا جهت چرخش را تغییر می دهد.
گیربکس های معمولی دنده/تسمه تنها مکانیسم سازگاری سرعت/گشتاور نیستند.
مکانیسم های جایگزین شامل مبدل های گشتاور و تبدیل قدرت (به عنوان مثال سیستم انتقال قدرت دیزلی و سیستم محرک هیدرولیک) است. تنظیمات ترکیبی نیز وجود دارد. گیربکس های اتوماتیک از بدنه دریچه برای تغییر دنده با استفاده از فشارهای سیال در پاسخ به دور موتور ، دور و ورودی گاز استفاده می کنند.
برای شروع خودرو از حالت استراحت ، شتاب ، صعود به تپه ، کشیدن بار و مواجهه با سایر مقاومتها گشتاور بالایی لازم است. اما موتور IC در محدوده سرعت م effectiveثر محدودی عمل می کند که نسبتاً گشتاور کمی تولید می کند. در چنین شرایطی ، موتور مسئول اصطبل است و اگر سرعت از حد مجاز کمتر شود ، خودرو استراحت می کند.
گشتاور ایجاد شده توسط موتور با افزایش دور موتور در محدوده افزایش می یابد و در برخی از دورهای غالب به حداکثر مقدار می رسد. اگر موتور مستقیماً به محور محرک متصل شود ، دور موتور ممکن است کاهش یابد.
با توجه به ماهیت متغیر مقاومت خودرو که منجر به تغییر بار و شیب می شود ، نیاز است که قدرت موتور در طیف وسیعی از سرعت های جاده در دسترس باشد. بنابراین ، به همین دلیل ، دور موتور با استفاده از چرخ دنده کاهش می یابد و باعث می شود چرخ های جاده با سرعت مناسب متناسب با شرایط کارکرد خودرو بچرخند.
بنابراین ، یک ضرب گشتاور منفرد در محور عقب باید درون هم قرار گیرد و ضریب ضرب متغیر در گیربکس برای این منظور در نظر گرفته شده است.
ضرورت GEARBOX:
برای حفظ سرعت موتور در همه شرایط بار و سرعت خودرو ، گیربکس از سیستم برای حفظ سرعت موتور استفاده می کند ، در حالی که سرعت یکسان جاده را قربانی می کند. برای اینکه موتور بتواند چرخ های سریعتر را در جاده حرکت دهد و همچنین گشتاور را چند برابر کند ، به گیربکس نیاز است.
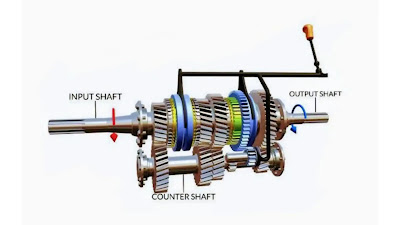
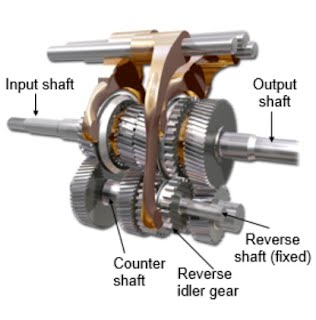
۱٫ شفت کلاچ / محور رانندگی / شفت ورودی
شفت کلاچ شفتی است که نیروی مورد نیاز را از موتور برای تامین شفت دیگر می گیرد. محور کلاچ یا محور محرک از طریق کلاچ متصل می شود و هنگامی که کلاچ درگیر می شود ، محور محرک نیز می چرخد. فقط یک دنده روی شفت کلاچ ثابت است و این موتور با همان سرعت میل لنگ می چرخد. علاوه بر این ، محور محرک و محور اصلی در یک خط قرار دارند.
۲٫ شفت شمارنده / شفت
شفت شمارنده شفتی است که مستقیماً به محور کلاچ متصل می شود. دارای دنده ای است که آن را به شاخه کلاچ و همچنین محور اصلی متصل می کند. با توجه به نسبت دنده می توان آن را در دور موتور یا زیر دور موتور اجرا کرد.
۳٫ شفت اصلی / شفت خروجی
شفت اصلی یا شفت خروجی که با سرعت های مختلف می چرخد و همچنین گشتاور لازم را برای خودرو فراهم می کند. شفت خروجی یک شفت پیچ خورده است ، به طوری که چرخ دنده یا همگام ساز را می توان حرکت داد تا درگیر یا خاموش شود.
۴٫ بلبرینگ
یاتاقان ها برای حمایت از قسمت چرخشی و کاهش اصطکاک مورد نیاز هستند. گیربکس دارای پیشخوان و شفت اصلی است که توسط بلبرینگ پشتیبانی می شود.
۵٫ چرخ دنده
چرخ دنده ها برای انتقال نیرو از یک شفت به شافت دیگر استفاده می شوند. میزان گشتاور منتقل شده از طریق چرخ دنده ها به تعداد دندانه ها و اندازه چرخ دنده ها بستگی دارد. نسبت دنده بیشتر ، گشتاور / شتاب بیشتر و سرعت کمتر است. همه چرخ دنده ها به استثنای چرخ های اصلی روی شفت مربوطه ثابت می شوند. آنها می توانند در هر جهت در امتداد شفت حرکت کنند.
۶٫ چنگال گیربکس دنده
انتخابگرهای گیربکس دستگاههای ساده ای هستند که از اهرمی استفاده می کنند که چرخ دنده ها را برای درگیر شدن در مکانیسم های جدا کردن انتخاب می کند. حرکت اهرم قسمت درگیر کننده را روی محور می کشاند. این بستگی به نوع گیربکس دارد که اهرم چرخ دنده را بکشاند یا همگام ساز که قبلاً در امتداد محور اصلی جعل شده است.
انواع گیربکس:
۱٫ انتقال دستی
(الف) گیربکس مش کشویی
(ب) گیربکس مش ثابت
(ج) گیربکس Synchromesh
۲٫ گیربکس اپیکیکلی
۳٫ گیربکس اتوماتیک
(الف) گیربکس هیدراماتیک
(ب) گیربکس مبدل گشتاور.
۱٫ گیربکس دستی:
گیربکس کشویی
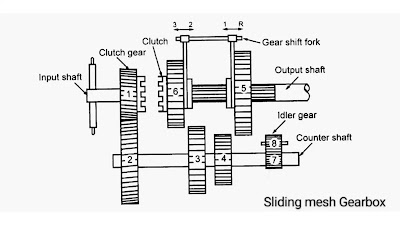
این ساده ترین نوع گیربکس است. در این گیربکس از چرخ دنده استفاده می شود. شکل ساخت و ساز یک گیربکس کشویی از نوع مش را نشان می دهد که دارای سه سرعت جلو و یک سرعت معکوس است. سه چرخ دنده (۱ ، ۶ و ۵) روی شفت اصلی و چهار چرخ دنده (۲ ، ۳ ، ۴ و ۷) روی شفت نصب شده است.
دو چرخ دنده روی شفت اصلی (۶ و ۵) را می توان با یوغ شفت و با چرخ دنده ها (۳ و ۴) بر روی یک میل لنگ کشاند. بنابراین ، به آن گیربکس مش کشویی می گویند. یک چرخ دنده جداگانه (۸) بر روی محور بیکار نصب شده است.
گیربکس مش ثابت
شکل ساخت یک گیربکس از نوع مش ثابت را نشان می دهد که دارای سه سرعت جلو و یک سرعت معکوس است. در این نوع گیربکس ، همه چرخ دنده ها دائماً مشبک هستند و از چنگال سگ برای درگیر شدن و خاموش کردن چرخ دنده ها استفاده می شود. چنگال های سگ (D) و D2) روی شفت اصلی نصب شده است. یکی (D2) بین دنده کلاچ و دنده عقب متصل است در حالی که دیگری (D) بین دنده کم سرعت و دنده عقب قرار می گیرد. اسپلین ها روی محور اصلی برای حرکت خطی سگ ها ارائه می شوند. کلاچ سگ می تواند روی شفت کشیده و همراه آن بچرخد. همه چرخ دنده ها به طور محکم بر روی شفت شمارنده ثابت می شوند.
همه چرخ دنده های اصلی محور و چرخ شفت ، و چرخ دنده های بی حرکت توسط کلاچ سگ درگیر می شوند تا سرعت مخالف و کند را بدست آورند. فقط دنده های عقب از نوع دنده ای هستند و بقیه دنده های مارپیچ هستند.
در مقایسه با نوع مش کشویی ، گیربکس نوع مش ثابت با سهولت بیشتری مشبک می شود و چرخ دنده ها خطر آسیب کمتری در حین مش بندی دارند زیرا قطر دنده ها با تعداد دندانه های کوچکتر کوچکتر است. بنابراین ، این نوع در مقایسه با نوع synchromesh دارای نقص های بیشتری است. لزوم چفت شدن دوگانه مورد نیاز است به طوری که از آن تا حد زیادی استفاده نمی شود.
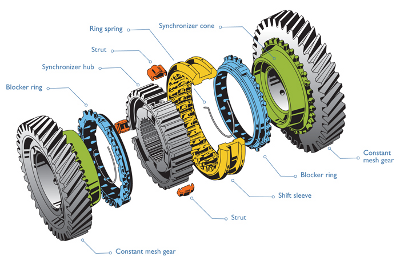
گیربکس Synchromesh:
گیربکس Synchromesh از Synchronizer به جای چنگالهای سگ کشویی برای تغییر نسبت استفاده می کند. گیربکس سنکرمش شبیه گیربکس مش ثابت است ، اما گیربکس سنکرمش دارای سنکرونایزر است ، وسیله ای که ابتدا دو دنده را درگیر می کند تا در تماس اصطکاکی قرار بگیرد که سرعت آنها را برابر می کند ، سپس به آرامی درگیر می شوند.
برای درگیر شدن ، هنگامی که اهرم چرخ دنده منتقل می شود ، مخروط همگام ساز با مخروطی مشابه روی پینیون ملاقات می کند. به دلیل اصطکاک ، چرخ دنده چرخشی ساخته می شود که با همان سرعت واحد سنکرمش بچرخد.
برای حرکت مثبت تر ، حرکت اهرم چرخ دنده باعث می شود تا کوپل چندین توپ بار فنری را نادیده بگیرد و کوپلینگ با قطعه کنار پین درگیر می شود.
از آنجایی که هر دو پایه و سنکرمش با یک سرعت در حال حرکت هستند ، این درگیری بدون سر و صدا و آسیب به سگ ها انجام می شود.
قبل از درگیر شدن با دندان های سگ ، کمی تأخیر لازم است تا مخروط ها بتوانند همگام ساز و پینیون را با سرعت یکسان به ارمغان بیاورند.

توضیح:
گیربکس های اولیه شامل محرک های راست زاویه و سایر چرخ دنده ها در آسیاب های بادی ، دستگاه های اسب سواری و موتورهای بخار ، در حمایت از پمپاژ ، فرز و بالابر بود.
بیشتر گیربکس های مدرن برای افزایش گشتاور و کاهش سرعت شفت خروجی اصلی (به عنوان مثال میل لنگ موتور) استفاده می شوند. این بدان معناست که محور خروجی گیربکس با سرعت کمتری نسبت به محور ورودی می چرخد و این کاهش سرعت یک مزیت مکانیکی ایجاد می کند و گشتاور را افزایش می دهد. می توان گیربکس را برعکس تنظیم کرد و با کاهش گشتاور ، سرعت شفت را افزایش داد. برخی از ساده ترین گیربکس ها فقط جهت چرخش فیزیکی انتقال نیرو را تغییر می دهند.
بسیاری از گیربکس های معمولی خودرو شامل قابلیت انتخاب یکی از چندین نسبت دنده است. در این حالت ، اکثر نسبت های دنده (که اغلب به سادگی “دنده” نامیده می شوند) برای کاهش سرعت خروجی موتور و افزایش گشتاور استفاده می شود. با این حال ، بالاترین چرخ دنده ها ممکن است از نوع “overdrive” باشند که سرعت خروجی را افزایش می دهند.
موارد مورد استفاده:
گیربکس ها در طیف گسترده ای از برنامه های مختلف – اغلب ساکن – مانند توربین های بادی مورد استفاده قرار گرفته اند.
گیربکس ها همچنین در تجهیزات کشاورزی ، صنعتی ، ساختمانی ، معدنی و خودرو استفاده می شوند. این تجهیزات علاوه بر گیربکس معمولی مجهز به چرخ دنده ، از درایو هیدرواستاتیک و درایوهای با سرعت قابل تنظیم الکتریکی استفاده گسترده ای می کند.
ساده ترین انتقال ها:
ساده ترین گیربکس ها که اغلب گیربکس نامیده می شوند تا سادگی آنها را منعکس کند (اگرچه به سیستم های پیچیده در زبان محلی گیربکس نیز گفته می شود) ، کاهش دنده (یا به ندرت افزایش سرعت) ، گاهی اوقات همراه با تغییر جهت در جهت از محور (معمولاً در هلیکوپترها ، تصویر را ببینید). اینها اغلب در تجهیزات کشاورزی مجهز به PTO استفاده می شوند ، زیرا محور PTO محوری با نیاز معمول به محور محرک ، که یا عمودی است (مانند مورس های چرخشی) ، یا افقی از یک طرف دستگاه به طرف دیگر امتداد دارد.
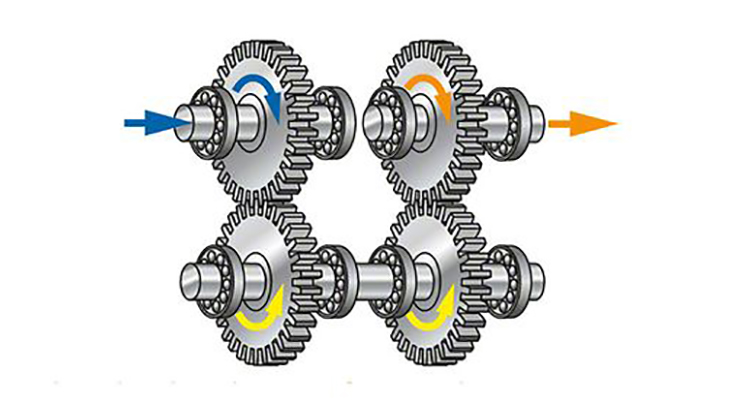
(مانند کودهای پخش کننده ، چمن زن و واگن علوفه). تجهیزات پیچیده تر ، مانند هلی کوپترهای سیلو و برف روب ، دارای رانندگی با خروجی در بیش از یک جهت هستند. همچنین هلیکوپترها از گیربکس گشتاور تقسیم شده استفاده می کنند که در آن نیرو از موتور در دو جهت برای روتورهای مختلف گرفته می شود.
گیربکس در توربین بادی چرخش آهسته و گشتاور زیاد توربین را به چرخش سریعتر ژنراتور الکتریکی تبدیل می کند.
این قطعات بسیار بزرگتر و پیچیده تر از گیربکس های PTO در تجهیزات کشاورزی هستند. وزن آنها چندین تن است و به طور معمول شامل سه مرحله است تا بسته به اندازه توربین ، نسبت دنده کلی از ۴۰: ۱ تا بیش از ۱۰۰: ۱ به دست آید.
(به دلایل آیرودینامیکی و ساختاری ، توربین های بزرگتر باید آهسته تر بچرخند ، اما همه ژنراتورها باید با سرعت مشابه چند هزار دور در دقیقه بچرخند.) اولین مرحله از گیربکس معمولاً یک چرخ دنده سیاره ای است ، برای فشردگی و توزیع گشتاور عظیمی از توربین بر روی دندانه های بیشتر شفت با سرعت کم.دوام این گیربکس ها برای مدت طولانی یک مشکل جدی بوده است.
صرف نظر از محل استفاده ، این گیربکس های ساده همه دارای ویژگی مهمی هستند: نسبت دنده را نمی توان در حین استفاده تغییر داد. در زمان ایجاد انتقال ثابت است.
برای انواع انتقال که بر این مشکل غلبه می کنند ، به انتقال مداوم متغیر ، که به آن CVT نیز می گویند ، مراجعه کنید.
اصول اولیه Automotive:
نیاز به گیربکس در خودرو نتیجه ویژگی های موتور احتراق داخلی است. موتورها معمولاً در محدوده ۶۰۰ تا ۷۰۰۰ دور در دقیقه کار می کنند (اگرچه این میزان متغیر است و معمولاً برای موتورهای دیزلی کمتر است) ، در حالی که چرخ های خودرو بین ۰ دور تا ۱۸۰۰ دور در دقیقه می چرخند.
علاوه بر این ، موتور بالاترین گشتاور و توان خروجی خود را به طور ناهموار در محدوده دور دور ایجاد می کند که منجر به ایجاد یک گشتاور و یک باند قدرت می شود. غالباً بیشترین گشتاور هنگام حرکت خودرو از حالت استراحت یا حرکت آهسته مورد نیاز است ، در حالی که حداکثر قدرت در سرعت بالا مورد نیاز است.
بنابراین ، به سیستمی نیاز است که خروجی موتور را تغییر دهد تا بتواند گشتاور بالایی در سرعتهای پایین ایجاد کند ، اما در سرعت های بزرگراه نیز کار کند و موتور همچنان در محدوده خود کار کند. انتقال این تغییر را انجام می دهد.
پویایی ماشین با سرعت متفاوت است: در سرعتهای پایین ، شتاب با اینرسی جرم ناخالص خودرو محدود می شود. در حالی که در سرعتهای حداکثر یا حداکثر سرعت ، مقاومت باد مانع غالب است.
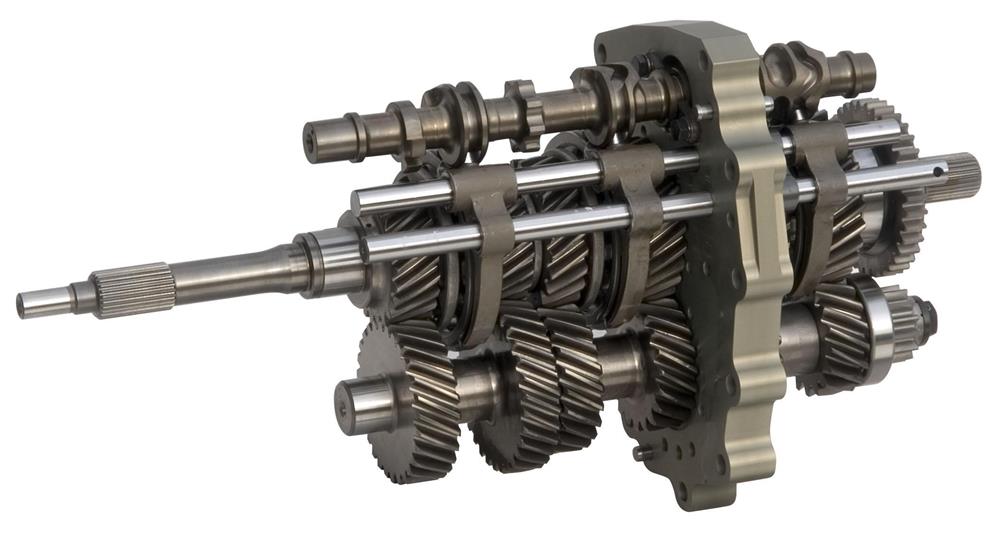
بسیاری از گیربکس ها و چرخ دنده های مورد استفاده در خودروها و کامیون ها در یک محفظه چدنی قرار دارند ، اگرچه بیشتر اوقات آلومینیوم برای وزن کمتر به ویژه در اتومبیل ها استفاده می شود. معمولاً سه شفت وجود دارد: شفت اصلی ، شفت ضد و شفت خالی.
شفت اصلی در خارج از بدنه در هر دو جهت امتداد می یابد: شفت ورودی به سمت موتور و شفت خروجی به سمت محور عقب (در خودروهای دیفرانسیل عقب. به طور کلی وسایل نقلیه محرک جلو دارای موتور و گیربکس عرضی هستند ، دیفرانسیل بخشی از مجموعه انتقال است.) محور توسط یاتاقانهای اصلی معلق شده و به سمت انتهای ورودی تقسیم می شود. در نقطه شکاف ، یاتاقان خلبان شفت ها را به هم می چسباند. چرخ دنده ها و کلاچ ها بر روی محور اصلی سوار می شوند ، چرخش دنده ها نسبت به محور اصلی آزاد است مگر در مواردی که توسط چنگال درگیر شوند.
Manual:
گیربکس دستی در دو نوع اصلی وجود دارد:
یک سیستم کشویی ساده اما مستحکم یا غیر همگام/غیر همزمان ؛ جایی که چرخ دنده های برش مستقیم می چرخند آزادانه می چرخند و باید توسط اپراتور با دور موتور مطابقت داشته باشد تا با دور جاده هماهنگ شود تا از برخورد پر سر و صدا و مخرب چرخ دنده ها جلوگیری شود.
گیربکس های مش ثابت در حال حاضر در همه جا ؛ که می تواند/شامل سیستم های غیر همگام/غیر همگام ، یا همگام/همگوش باشد ، جایی که معمولاً مجموعه دنده های مارپیچ مورب (یا گاهی اوقات یا برش مستقیم یا دو مارپیچ) دائماً “به هم” متصل می شوند و کلاچ سگ برای تعویض دنده استفاده می شود. در جعبه های سنکرمش ، مخروط اصطکاک یا “حلقه های سنکرون” علاوه بر کلاچ سگ استفاده می شود تا با سرعت چرخش دو طرف گیربکس (جدا شده) قبل از ایجاد درگیری مکانیکی کامل مطابقت داشته باشد.
نوع قبلی در بسیاری از اتومبیل های قدیمی (در کنار سیستم های اپیکسیکل و چند کلاچه) قبل از توسعه راهنمای مش ثابت و اتوماتیک هیدرولیک-اپی سیکلیک ، کامیون های سنگین قدیمی ، استاندارد بود و هنوز در برخی موارد استفاده می شود. تجهیزات کشاورزی دومی استاندارد مدرن برای حمل و نقل دستی و خارج از جاده دستی و اتوماتیک گیربکس دستی است ، اگرچه ممکن است در اشکال مختلف یافت شود.
به عنوان مثال ، برش مستقیم همزمان نشده در پیست مسابقه یا برنامه های فوق العاده سنگین ، برش مارپیچ غیر همزمان در اکثر کامیون های سنگین و موتورسیکلت ها ، و در برخی از خودروهای کلاسیک (به عنوان مثال ، فیات (۵۰۰) ، و تا حدی یا تقریباً در تمام اتومبیل های مسافربری و کامیون های سبک مدرن با چرخ دستی دستی هماهنگ شده است.
گیربکس های دستی رایج ترین نوع در خارج از آمریکای شمالی و استرالیا هستند. ارزان تر ، سبک تر ، معمولاً عملکرد بهتری دارند ، اما جدیدترین گیربکس های اتوماتیک و CVT ها مصرف سوخت بهتری را ارائه می دهند.مرسوم است که رانندگان جدید ماشین را با تعویض دنده دستی یاد بگیرند و مورد آزمایش قرار گیرند. در مالزی و دانمارک همه خودروهایی که برای آزمایش استفاده می شوند.(و به همین دلیل ، تقریباً همه آنهایی که برای آموزش نیز استفاده می شوند) دارای گیربکس دستی هستند. در ژاپن ، فیلیپین ، آلمان ، لهستان ، ایتالیا ، اسرائیل ، هلند ، بلژیک ، نیوزلند ، اتریش ، بلغارستان ، انگلستان ،ایرلند ، سوئد ، نروژ ، استونی ، فرانسه ، اسپانیا ، سوئیس ، ایالت های استرالیا ویکتوریا ،استرالیای غربی و کوئینزلند ، فنلاند ، لتونی ،لیتوانی و جمهوری چک ، گذراندن تست با استفاده از ماشین اتوماتیک به راننده این حق را نمی دهد که از یک ماشین دستی در جاده عمومی استفاده کند. آزمایش با ماشین دستی مورد نیاز است. [نیاز به منبع] گیربکس های دستی بسیار رایج تر از گیربکس های اتوماتیک در آسیا ، آفریقا ، آمریکای جنوبی و اروپا هستند.
گیربکس های دستی می توانند شامل چرخ دنده های همزمان و غیر همزمان شوند.
به عنوان مثال ، دنده عقب معمولاً غیر همزمان است ، زیرا انتظار می رود راننده تنها در مواقعی که خودرو در حالت سکون قرار دارد آن را درگیر کند. بسیاری از خودروهای قدیمی (تا دهه ۱۹۷۰) نیز در دنده اول هماهنگ نبودند (به دلایل مختلف-هزینه ، معمولاً دنده کلی “کوتاه تر” ، موتورها معمولاً دارای گشتاور پایین تر هستند ، ساییدگی شدید در یک همگام ساز دنده اول اغلب استفاده می شود … ) ، به این معنی که فقط می تواند برای دور شدن از ایستگاه مورد استفاده قرار گیرد مگر اینکه راننده در دو حالت کشش مهارت پیدا کند و نیاز خاصی به مرتب پایین رفتن در پایین ترین دنده داشته باشد.
برخی از گیربکس های دستی نسبت به دنده اول نسبت بسیار پایینی دارند که دنده خزنده یا چرخ دنده نامیده می شود. چنین چرخ دنده هایی معمولاً همزمان نمی شوند.
این ویژگی در خودروهای وانت متداول برای یدک کش تریلر ، کشاورزی یا کار در محل ساخت و ساز رایج است. در حین استفاده معمولی در جاده ، کامیون معمولاً بدون استفاده از چرخ دنده خزنده رانندگی می کند و دنده دوم از شروع ایستاده استفاده می شود. برخی از وسایل نقلیه آفرود ، به ویژه جیپ ویلیز و فرزندان آن ، گیربکس هایی با “مادربزرگ اول” را به صورت استاندارد یا اختیاری داشتند ، اما این عملکرد در حال حاضر بیشتر توسط یک گیربکس انتقال کم برد متصل به یک معمولی انجام می شود.
Non-synchronous:

برخی از برنامه های تجاری از گیربکس های دستی غیرهمگام استفاده می کنند که نیاز به اپراتور ماهر دارد. بسته به کشور ، بسیاری از قوانین محلی ، منطقه ای و ملی بر عملکرد این نوع وسایل نقلیه حاکم است (به گواهینامه رانندگی تجاری مراجعه کنید). این کلاس ممکن است شامل وسایل نقلیه تجاری ، نظامی ، کشاورزی یا مهندسی باشد.
برخی از اینها ممکن است از ترکیب انواع برای توابع چند منظوره استفاده کنند. به عنوان مثال می توان به دنده برقی (PTO) اشاره کرد. نوع انتقال غیر همزمان نیاز به درک محدوده دنده ، گشتاور ، قدرت موتور و عملکردهای کلاچ و دنده های چند منظوره دارد. گیربکس های دستی متوالی ، که معمولاً در موتورسیکلت ها و اتومبیل های مسابقه استفاده می شوند ، نوعی گیربکس دستی غیر همزمان هستند.
اتوماتیک:
اکثر خودروهای مدرن آمریکای شمالی و برخی از خودروهای اروپایی و ژاپنی دارای گیربکس اتوماتیک هستند که نسبت دنده مناسب را بدون دخالت اپراتور انتخاب می کند. آنها عمدتا از هیدرولیک برای انتخاب چرخ دنده ها استفاده می کنند ، بسته به فشار وارد شده توسط سیال در مجموعه گیربکس. به جای استفاده از کلاچ برای گیربکس ، یک چرخ فلک سیال یا مبدل گشتاور بین موتور و گیربکس قرار می گیرد.
این امکان برای راننده وجود دارد که تعداد دنده های مورد استفاده را کنترل کرده یا دنده عقب را انتخاب کند ، هرچند که کنترل دقیق کدام دنده در حال استفاده است یا ممکن است امکان پذیر نباشد.
استفاده از گیربکس های اتوماتیک آسان است. با این حال ، در گذشته ، برخی از گیربکس های اتوماتیک از این نوع دارای تعدادی مشکل بودند. آنها پیچیده و گران قیمت بودند ، گاهی اوقات مشکلات قابلیت اطمینان داشتند (که گاهی هزینه های بیشتری را در تعمیر ایجاد می کرد) ، اغلب از نظر مصرف سوخت کمتری نسبت به نمونه های دستی خود داشتند (به دلیل “لغزش” در مبدل گشتاور) ، و زمان شیفت آنها کندتر از یک دفترچه راهنما که آنها را برای مسابقه غیرقابل رقابت می کند. با پیشرفت گیربکس های اتوماتیک مدرن ، این امر تغییر کرده است.
تلاش برای بهبود بهره وری سوخت گیربکس های اتوماتیک شامل استفاده از مبدل های گشتاور است که فراتر از سرعت معینی یا نسبت دنده های بالاتر قفل می شوند ، اتلاف توان را حذف کرده و دنده هایی را که به طور خودکار بالاتر از سرعت های معینی عمل می کنند ، از بین می برد. در گیربکس های قدیمی تر ، هر دو فناوری می توانند مزاحم باشند ، در شرایطی که شرایط به گونه ای باشد که بارها و بارها به عنوان سرعت وارد و خارج شوند و عوامل بار مانند درجه یا باد کمی متفاوت باشد. گیربکس های رایانه ای کنونی دارای برنامه نویسی پیچیده ای هستند که هم کارایی سوخت را به حداکثر می رساند و هم نفوذ را حذف می کند.
این عمدتا به دلیل پیشرفت های الکترونیکی است نه مکانیکی ، اگرچه پیشرفت در فناوری CVT و استفاده از کلاچ های اتوماتیک نیز کمک کرده است. چند خودرو ، از جمله سوبارو ایمپرزا ۲۰۱۳ و مدل ۲۰۱۲ هوندا جاز فروخته شده در انگلستان ، در واقع ادعا می کنند مصرف سوخت نسبتاً بهتری برای نسخه CVT نسبت به نسخه دستی دارد.
برای برخی از کاربردها ، لغزش ذاتی گیربکس های اتوماتیک می تواند مفید باشد. به عنوان مثال ، در مسابقات درگ ، گیربکس اتوماتیک به خودرو اجازه می دهد تا موتور را با دور در دقیقه (“سرعت توقف”) متوقف کند تا با رها شدن ترمزها ، راه اندازی بسیار سریعی داشته باشد. در حقیقت ، یک اصلاح رایج افزایش سرعت گیربکس است.
این برای موتورهای توربوشارژر بسیار مفیدتر است ، جایی که توربوشارژر باید با دور زیاد دور موتور با جریان زیاد اگزوز به دور خود بچرخد تا فشار تقویت شده را حفظ کرده و تاخیر توربو را که هنگام باز شدن ناگهانی دریچه گاز بر روی یک موتور بیکار باز می شود ، از بین ببرد.
Automated manual:
گیربکس دستی اتوماتیک (AMT) نوعی سیستم انتقال خودروهای چند سرعته است که بر اساس طراحی مکانیکی و ساخت گیربکس دستی معمولی است.
اما از آن استفاده می کند. اتوماسیون برای کنترل کلاچ و/یا تعویض دنده.
نسخه های مدرن این سیستم ها از اواسط دهه ۱۹۹۰ در اتومبیل های تولید انبوه ظاهر شدند و به طور کامل اتوماتیک کار می کنند. نامهای تجاری شامل Selespeed و Easytronic هستند و می توانند عملکرد کلاچ و تعویض دنده را بطور خودکار با استفاده از ECU کنترل کنند ، بنابراین نیازی به دخالت دستی یا ورودی راننده در تعویض دنده ندارد.
استفاده از AMT های کنترل شده با رایانه مدرن در خودروهای سواری در اواسط دهه ۱۹۹۰ افزایش یافته است ، به عنوان یک جایگزین ورزشی بیشتر برای گیربکس اتوماتیک هیدرولیک سنتی. در طول دهه ۲۰۱۰ ، طراحی گیربکس دو کلاچه به طور گسترده ای جایگزین AMT ها شد.
دستی بدون کلاچ / نیمه اتوماتیک:
گیربکس دستی پی در پی (مانند نوع گیربکس مورد استفاده در موتور سیکلت تمام دستی) نوعی گیربکس دستی چند سرعته چند سرعته است که فقط به راننده اجازه می دهد تا دنده بعدی را انتخاب کند (به عنوان مثال ، تغییر دنده دوم به دنده اول) یا دنده قبلی (به عنوان مثال تغییر دنده دوم به دنده سوم) ، به ترتیب متوالی.
این محدودیت از انتخاب تصادفی چرخ دنده جلوگیری می کند ، با این حال ، راننده را از عمداً “پرش” دنده ها باز می دارد. کلاچ در گیربکس دستی پی در پی تنها هنگام حرکت از حالت سکون (به عنوان مثال ثابت و خنثی) به دنده ۱ مورد نیاز است ، پس از آن ، از آنجا که دنده ها از طریق سگ ها به محل خود مجبور می شوند ، بدون کلاچ تغییر می کند.
این در مقایسه با گیربکس دستی معمولی است که از سنکرمش برای تعویض دنده نرم استفاده می کند.استفاده از چنگال قطعه منجر به سرعت بیشتر در تعویض نسبت به گیربکس دستی می شود.
در گیربکس های دستی پی در پی از چرخاندن طبل و چنگال های انتخاب کننده برای تعویض دنده استفاده می شود ، مانند آنچه در گیربکس موتورسیکلت کاملا دستی استفاده می شود.مکانیسم درام شیفت در یک حرکت جلو و عقب توسط یک اتصال مکانیکی (به عنوان مثال ، اهرم شیفت) یا از طریق یک سیستم کنترل الکترو پنوماتیک یا الکترو هیدرولیک متصل شده و می چرخد ، که معمولاً به صورت مکانیکی به چنگال های شیفت متصل می شود. و سگ ها را چنگ می زند و با چرخ دنده ها ، پشت فرمان عمل می کند.
آنها همچنین می توانند با سیستم کلاچ دستی یا اتوماتیک طراحی شوند. گیربکس های پی در پی نیمه اتوماتیک (با کلاچ اتوماتیک) ممکن است در اتومبیل ها (عمدتا پیست و برخی از مسابقات اتومبیلرانی رالی ، به عنوان مثال ، پدل شیفت) ، موتورسیکلت ها (معمولاً دوچرخه های سبک شهری سبک “گام به گام” ، مانند هوندا سوپر) Cub) و دوچرخه های چهارگانه (اغلب با دنده عقب به طور جداگانه درگیر هستند) ، دو مورد اخیر معمولاً از کلاچ گریز از مرکز به سبک اسکوتر استفاده می کنند.
در گیربکس دستی پی در پی ، اهرم شیفت یک مکانیزم چوب دستی عمل می کند که حرکت جلو و عقب اهرم شیفت را به چرخش یک درام انتخاب کننده (که گاهی اوقات به آن بشکه نیز می گویند) تبدیل می کند که دارای سه یا چهار ردیف در اطراف محیط خود است.چنگال های انتخاب کننده توسط آهنگها ، مستقیم یا از طریق میله های انتخاب کننده هدایت می شوند.
مسیرها در اطراف محیط منحرف می شوند و با چرخاندن درام ، چنگال های انتخاب کننده برای انتخاب چرخ دنده مورد نیاز حرکت می کنند.
چرخ دنده دوچرخه:
دوچرخه ها معمولاً دارای سیستمی برای انتخاب نسبت دنده های مختلف هستند. دو نوع اصلی وجود دارد:
چرخ دنده های چرخ دنده و چرخ دنده هاب. نوع چرخ دنده رایج ترین و قابل مشاهده ترین است که از چرخ دنده های چرخ دنده ای استفاده می شود. به طور معمول چندین دنده در مجموعه چرخ دنده عقب وجود دارد که به چرخ عقب متصل شده است. معمولاً چند چرخ دنده دیگر به مجموعه جلو نیز اضافه می شود. ضرب تعداد دنده های چرخ دنده جلو با تعداد به عقب ، تعداد نسبت دنده ها را که اغلب “سرعت” نامیده می شود ، می دهد.
چرخ دنده های توپی از چرخ دنده های چرخه ای استفاده می کنند و در محور چرخ عقب محصور شده اند. به دلیل فضای کوچک ، آنها معمولاً سرعتهای متفاوتی کمتر ارائه می دهند ، اگرچه حداقل یکی به ۱۴ نسبت دنده رسیده است و Fallbrook Technologies یک گیربکس را با نسبتهای فنی بی نهایت تولید می کند. [۳۸]
چندین بار تلاش شده است که دوچرخه ها با گیربکس محصور شوند و مزایای آشکاری برای روانکاری بهتر ، آب بندی خاک و جابجایی دارند. اینها معمولاً با یک محور محرک همراه هستند ، زیرا گیربکس با زنجیر سنتی (مانند چرخ دنده هاب) هنوز هم بسیاری از معایب چرخ دنده را برای زنجیره نمایان دارد. گیربکس های دوچرخه در جعبه ای جایگزین براکت پایین سنتی قرار گرفته است. نیاز به یک قاب اصلاح شده ، یک ایراد جدی برای پذیرش آنها بوده است. یکی از جدیدترین تلاش ها برای تهیه گیربکس برای دوچرخه ، Pinion P1.18 18 سرعته است.
این یک گیربکس محصور می کند ، اما هنوز یک زنجیر سنتی است. هنگامی که بر روی دوچرخه تعلیق عقب نصب می شود ، کشنده زنجیر قفس سوار مانند چرخ دنده را نیز حفظ می کند ، هرچند بدون فاصله کم راننده از زمین.دلایل خرابی چرخ دنده دوچرخه شامل دندان های فرسوده ، آسیب ناشی از زنجیر معیوب ، آسیب ناشی از انبساط حرارتی ، شکستگی دندان ها در اثر نیروی زیاد رکاب زدن ، تداخل اجسام خارجی و از بین رفتن روانکاری به دلیل سهل انگاری است.
انواع غیر معمول:
گیربکس دو کلاچه (DCT) (گاهی اوقات به عنوان گیربکس دو کلاچه یا گیربکس دو کلاچه نیز نامیده می شود) نوعی سیستم انتقال قدرت چند سرعته خودرو است که از دو کلاچ جداگانه برای مجموعه های دنده های زوج و فرد استفاده می کند.طراحی اغلب شبیه به دو گیربکس دستی جداگانه است که کلاچ های مربوطه آنها در یک محفظه قرار دارند و به عنوان یک واحد کار می کنند.در کاربردهای خودرو و کامیون ، DCT به عنوان یک گیربکس اتوماتیک عمل می کند ، برای تعویض دنده نیازی به ورودی راننده نیست.
یک گیربکس دو کلاچه از دو مجموعه داخلی استفاده می کند که هر کدام دارای کلاچ مخصوص به خود هستند ، به طوری که “تعویض دنده” در واقع فقط شامل یک کلاچ است که در حالت دیگر از کار می افتد-که ظاهراً یک تغییر “بدون درز” را بدون هیچ گونه شکستن (یا بازپس گیری سریع) ایجاد می کند. از) انتقال نیرو شفت متصل هر کلاچ نیمی از مکمل چرخ دنده ورودی (با محور خروجی مشترک) را حمل می کند ، از جمله سیستم های کلاچ سگ همگام سازی شده که از پیش تعیین می کند کدام یک از نسبت های آن به احتمال زیاد در شیفت بعدی ، تحت فرمان کنترل کامپیوتری ، مورد نیاز است. سیستم. انواع خاصی از این گیربکس عبارتند از: گیربکس مستقیم-تعویض و SST دوقلو.
پیوسته متغیر:
گیربکس پیوسته متغیر (CVT) یک انتقال است که در آن نسبت سرعت چرخش دو محور ، به عنوان محور ورودی و محور خروجی یک وسیله نقلیه یا ماشین دیگر ، می تواند به طور مداوم در محدوده معینی متغیر باشد و تعداد بی نهایت نسبت های احتمالی CVT به راننده یا رایانه اجازه می دهد تا رابطه بین سرعت موتور و سرعت چرخ ها را در یک محدوده پیوسته انتخاب کند.
اگر موتور به طور مداوم با یک دور کار کند ، این می تواند حتی مصرف سوخت بهتری را تأمین کند. از نظر تئوری ، گیربکس می تواند تجربه کاربری بهتری را بدون بالا و پایین رفتن سرعت موتور داشته باشد و هنگام حرکت ضعیف دنده ، حرکت تند و تیز احساس می شود.
CVT ها به طور فزاینده ای در اتومبیل های کوچک و به ویژه خودروهای گازسوز با مسافت پیموده شده یا هیبریدی یافت می شوند. در این سکوها ، گشتاور محدود است زیرا موتور الکتریکی می تواند بدون تغییر سرعت موتور گشتاور ایجاد کند. با روشن ماندن موتور با سرعتی که بهترین مسافت پیموده شده گاز را برای شرایط عملکرد معین ایجاد می کند ، مسافت پیموده شده کلی را می توان در سیستمی با تعداد دنده های ثابت کوچکتر بهبود بخشید ، جایی که سیستم ممکن است در حداکثر کارایی فقط برای یک برد کوچک کار کند.
از سرعتها CVT ها در تجهیزات کشاورزی نیز یافت می شوند. با توجه به گشتاور بالای این خودروها ، چرخ دنده های مکانیکی یکپارچه می شوند تا نیروی کششی را در سرعت های بالا ارائه دهند. سیستم مشابه گیربکس هیدرواستاتیک است و در “سرعتهای inching” کاملاً به درایو هیدرواستاتیک متکی است. تراکتورسازی آلمانی Fendt پیشگام این فناوری بود و انتقال “Vario” خود را توسعه داد.
بی نهایت متغیر:
IVT یک نوع خاص از CVT است که نه تنها تعداد نامحدود نسبت دنده را شامل می شود ، بلکه محدوده “بی نهایت” را نیز شامل می شود. این به نوبه خود عبارت است ، در واقع به CVT هایی اطلاق می شود که قادرند “نسبت صفر” را شامل شوند ، جایی که شفت ورودی می تواند بدون هیچ گونه حرکت محور خروجی در حالی که در دنده باقی مانده است بچرخد. نسبت دنده ، در این حالت ، “بی نهایت” نیست ، بلکه “نامشخص” است.
اکثر IVT ها (اگر نه همه) از ترکیب CVT با سیستم چرخ دنده اپیکیکلیک با نسبت ثابت حاصل می شوند. ترکیبی از نسبت ثابت چرخ دنده چرخه ای با نسبت تطبیق خاص در سمت CVT خروجی صفر را در پی دارد. به عنوان مثال ، یک گیربکس با چرخ دنده چرخه ای را روی ۱: − ۱ نسبت دنده تنظیم کنید. دنده عقب ۱: ۱ وقتی طرف CVT روی ۱: ۱ تنظیم شود ، دو نسبت به صفر خروجی می افزایند. IVT همیشه درگیر است ، حتی در زمان خروجی صفر آن. هنگامی که CVT روی مقادیر بالاتر تنظیم می شود ، معمولاً با افزایش نسبت به جلو کار می کند.
در عمل ، چرخ دنده ممکن است در کمترین نسبت ممکن CVT تنظیم شود ، در صورتی که نیازی به دنده عقب نباشد یا از راههای دیگر استفاده نشود. معکوس را می توان با تنظیم نسبت چرخ دنده تا حدی بالاتر از پایین ترین نسبت CVT ، با ارائه طیف وسیعی از نسبت های معکوس ، ترکیب کرد.
متغیر الکتریکی:
گیربکس متغیر الکتریکی (EVT یا e-CVT) یک گیربکس را با یک موتور الکتریکی ترکیب می کند تا توهم یک CVT واحد را ایجاد کند. در اجرای متداول ، یک موتور بنزینی به گیربکس سنتی متصل می شود ، که به نوبه خود به حامل سیاره سیستم چرخ دنده های epicyclic متصل می شود. یک موتور الکتریکی/ژنراتور به چرخ دنده مرکزی “خورشید” متصل می شود ، که معمولاً در سیستم های معمولی اپی سیکلی بدون حرکت است. هر دو منبع قدرت را می توان همزمان در خروجی گیربکس تغذیه کرد و قدرت را بین آنها تقسیم کرد.
در نمونه های رایج ، بین یک چهارم تا نیمی از قدرت موتور را می توان به دنده خورشیدی تغذیه کرد. بسته به نحوه اجرا ، انتقال جلوی سیستم اپیکیکلیک ممکن است بسیار ساده شده یا به طور کامل حذف شود. EVT ها می توانند به طور مداوم نسبتهای سرعت خروجی/ورودی مانند CVT های مکانیکی را تعدیل کنند ، اما مزیت متمایز این را دارند که بتوانیم از دو منبع مختلف به یک خروجی نیز قدرت را اعمال کنیم و همچنین به طور بالقوه پیچیدگی کلی را به طور چشمگیری کاهش دهیم.
در پیاده سازی های معمولی ، نسبت دنده سیستم انتقال و گیربکس به نسبت شرایط معمول رانندگی ، مثلا سرعت بزرگراه برای یک خودرو ، یا سرعت شهر برای اتوبوس تنظیم می شود. وقتی راننده گاز را فشار می دهد ، وسایل الکترونیکی مربوطه موقعیت پدال را تفسیر می کنند و بلافاصله موتور بنزینی را در RPM تنظیم می کنند که بهترین مسافت پیموده شده گاز را برای آن تنظیمات فراهم می کند.
از آنجا که نسبت دنده به طور معمول دور از حداکثر نقطه گشتاور تنظیم شده است ، این تنظیم به طور معمول منجر به شتاب بسیار ضعیفی می شود. بر خلاف موتورهای بنزینی ، موتورهای الکتریکی گشتاور کارآمد را در طیف گسترده ای از RPM ارائه می دهند و به ویژه در تنظیمات پایین که موتور بنزینی ناکارآمد است مثر هستند.
با تغییر بار الکتریکی یا منبع تغذیه موتور متصل به چرخ دنده خورشیدی ، می توان گشتاور اضافی برای جبران گشتاور پایین موتور ارائه کرد. با افزایش سرعت خودرو ، قدرت موتور کاهش می یابد و در نهایت خاتمه می یابد و توهم یک CVT را ایجاد می کند.
مثال عادی EVT ، Hybrid Synergy Drive تویوتا است. این سیستم هیچ گیربکس معمولی ندارد و دنده خورشیدی همیشه ۲۸ درصد گشتاور را از موتور دریافت می کند. از این نیرو می توان برای اعمال هرگونه بار الکتریکی در خودرو ، شارژ مجدد باتری ها ، تغذیه سیستم سرگرمی یا سیستم تهویه مطبوع استفاده کرد. سپس هرگونه نیروی باقیمانده به موتور دوم بازگردانده می شود که خروجی پیشرانه را مستقیماً تغذیه می کند. در سرعت های بزرگراه ، این مسیر اضافی ژنراتور/موتور کمتر از قدرت مستقیم چرخ ها است.
با این حال ، در حین شتاب ، مسیر الکتریکی بسیار کارآمدتر از موتوری است که تا این لحظه از نقطه گشتاور کار می کند.جنرال موتورز از سیستم مشابهی در پیشرانه های هیبریدی Allison Bus و وانت های Tahoe و Yukon استفاده می کند ، اما در این سیستم ها از گیربکس دو سرعته در جلوی سیستم اپیکیکلی استفاده می شود و دنده خورشیدی نزدیک به نیمی از کل قدرت را دریافت می کند.
مکانیزم رانندگی مستقیم:
مکانیسم حرکت مستقیم جایی است که انتقال قدرت مکانیکی و گشتاور از موتور الکتریکی به دستگاه خروجی (مانند چرخ های محرک خودرو) بدون کاهش دنده اتفاق می افتد.
چندین خودرو از اواخر قرن نوزدهم از موتورهای توپی چرخ محرک مستقیم استفاده می کردند ، مانند برخی از خودروهای مفهومی در اوایل دهه ۲۰۰۰ ؛ با این حال ، اکثر اتومبیل های برقی مدرن از موتورهای داخلی استفاده می کنند ، جایی که رانندگی از طریق محور محرک یا محورها به چرخ ها منتقل می شود.
غیر مستقیم:
گیربکس های الکتریکی با استفاده از ژنراتورهای الکتریکی قدرت مکانیکی موتور (ها) را به الکتریسیته تبدیل می کند و با موتورهای الکتریکی آن را به قدرت مکانیکی تبدیل می کند. برای کنترل سرعت و گشتاور موتورها از سیستم های کنترل برقی با سرعت قابل تنظیم برقی یا الکترونیکی استفاده می شود.
اگر ژنراتورها توسط توربین ها حرکت می کنند ، چنین تنظیماتی انتقال توربو الکتریکی نامیده می شود. به همین ترتیب ، تأسیساتی که از موتورهای دیزلی استفاده می کنند دیزل الکتریک نامیده می شوند.
در بسیاری از لوکوموتیوهای راه آهن ، کشتی ها ، کامیون های معدن بزرگ و برخی از بولدوزرها از تنظیمات دیزلی-برقی استفاده می شود. در این موارد ، هر چرخ محرک به موتور الکتریکی مخصوص خود مجهز است که می تواند از توان الکتریکی متفاوتی تغذیه کند تا گشتاور یا توان خروجی مورد نیاز هر چرخ را به طور مستقل تأمین کند. این یک راه حل بسیار ساده تر برای چند چرخ محرک در خودروهای بسیار بزرگ تولید می کند ، جایی که محورهای محرک بسیار بزرگتر یا سنگین تر از کابل الکتریکی هستند که می تواند به همان میزان قدرت را تأمین کند. همچنین توانایی حرکت چرخ های مختلف با سرعت های مختلف را افزایش می دهد ، که برای چرخ های فرمان دار در خودروهای ساختمانی بزرگ مفید است.
هیدرواستاتیک:
انتقال هیدرواستاتیک با استفاده از اجزای ماشین آلات هیدرولیک ، تمام نیرو را به صورت هیدرولیکی منتقل می کند. آنها شبیه به گیربکس های الکتریکی هستند اما از مایع هیدرولیک به عنوان سیستم توزیع قدرت به جای برق استفاده می کنند.
درایو ورودی گیربکس یک پمپ هیدرولیک مرکزی است و واحد (های) محرک نهایی یک موتور هیدرولیک یا سیلندر هیدرولیک است/هستند (نگاه کنید به: بشقاب). هر دو قطعه را می توان از نظر فیزیکی بسیار دور از یکدیگر روی دستگاه قرار داد و فقط توسط شیلنگ های انعطاف پذیر به هم متصل می شوند. سیستم های محرک هیدرواستاتیک در بیل مکانیکی ، تراکتورهای چمن ، لیفتراک ، سیستم های وینچ ، تجهیزات بالابر سنگین ، ماشین آلات کشاورزی ، تجهیزات زمینی و غیره استفاده می شود. احتمالاً از ترتیبی برای انتقال وسایل نقلیه موتوری در ماشین مسابقه ای Ferguson F-1 P99 استفاده شده است. در حدود ۱۹۶۱
انتقال دوستانه هوندا DN-01 هیدرواستاتیک است.
هیدرودینامیک:
اگر پمپ هیدرولیک یا موتور هیدرولیک از اثرات هیدرودینامیکی جریان سیال استفاده می کند ، یعنی فشار ناشی از تغییر در حرکت سیال هنگام عبور از پره های توربین. پمپ و موتور معمولاً از پره های دوار بدون مهر و موم تشکیل شده و معمولاً در مجاورت یکدیگر قرار می گیرند. نسبت انتقال را می توان با استفاده از پره های چرخان اضافی تغییر داد ، تاثیری شبیه به تغییر ارتفاع پروانه هواپیما.
مبدل گشتاور در اکثر گیربکس های اتوماتیک اتومبیل به خودی خود یک گیربکس هیدرودینامیکی است. گیربکس های هیدرودینامیکی در بسیاری از وسایل نقلیه ریلی مسافرتی استفاده می شود ، در مواردی که از گیربکس های برقی استفاده نمی کنند. در این کاربرد ، مزیت تحویل قدرت صاف ممکن است بیشتر از بازده کاهش یافته ناشی از تلفات انرژی تلاطم در سیال باشد.
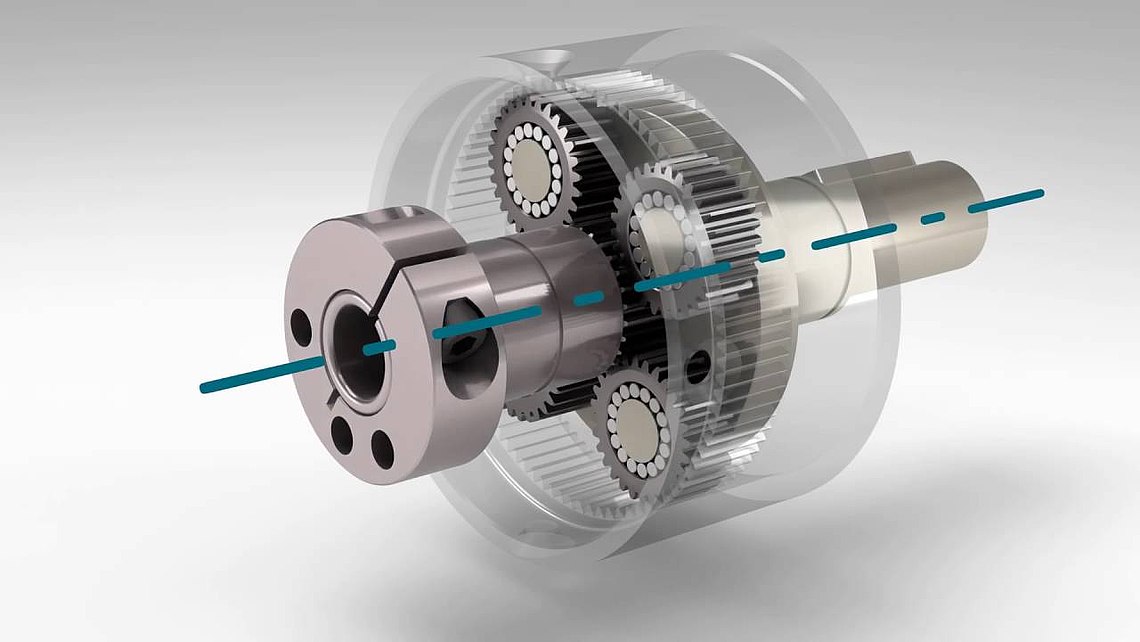
گیربکس اپیکسلیک
قطار چرخ دنده ای (که به آن چرخ دنده سیاره ای نیز می گویند) از دو چرخ دنده تشکیل شده است به طوری که مرکز یک چرخ دنده به دور مرکز دیگر چرخش می کند. یک حامل مراکز دو چرخ دنده را به هم متصل می کند و می چرخد تا یک چرخ دنده موسوم به چرخ دنده سیاره یا چرخ دنده سیاره را در اطراف چرخ دنده دیگر به نام چرخ دنده خورشیدی یا چرخ خورشید بچرخاند.
پرتوهای سیاره و خورشید تله هایی را ایجاد می کنند به طوری که دایره گام آنها بدون لغزش چرخیده است. یک نقطه در دایره گام چرخ دنده های سیاره ای یک منحنی اپیکسیکل را ترسیم می کند. در این مورد ساده ، چرخ دنده خورشیدی ثابت است و چرخ دنده های سیاره ای در اطراف چرخ دنده های خورشیدی وجود دارد.
قطار چرخ دنده ای را می توان طوری مونتاژ کرد که چرخ دنده سیاره ای بر روی یک حلقه دنده ثابت و خارجی یا داخل دایره پیچ دنده حلقه که گاهی اوقات دنده حلقوی نامیده می شود ، چرخانده شود. در این مورد ، منحنی تشخیص داده شده توسط یک نقطه در دایره گام سیاره یک هیپوسیکلوئید است.
ترکیبی از قطارهای چرخ دنده ای با سیاره ای که هم دنده خورشیدی و هم دنده ای را درگیر می کند ، قطار دنده ای سیاره ای نامیده می شود. در این حالت معمولاً چرخ دنده ثابت می شود و دنده خورشیدی کار می کند.
هدف از جعبه دنده
- این امر به جدا شدن موتور از چرخ های محرک کمک می کند.
- این به موتور در حال حرکت کمک می کند تا به راحتی و بدون ضربه به چرخ محرک متصل شود.
- این اهرم بین موتور و چرخ های محرک متفاوت است.
- این به کاهش سرعت موتور به نسبت ۴: ۱ در مورد خودروهای سواری و نسبت بیشتر در مورد خودروهای سنگین مانند کامیون ها و کامیون ها کمک می کند.
- این به چرخ های محرک کمک می کند تا با سرعت های مختلف حرکت کنند.
- به دلیل خم شدن فنر جاده ، حرکت نسبی بین موتور و چرخ های محرک را ایجاد می کند
عملکرد گیربکس:
نسبت گشتاور بین موتور و چرخ ها باید برای شتاب سریع و شیب های بالا رفتن متفاوت باشد.
این وسیله معکوس حرکت وسیله نقلیه را فراهم می کند.
گیربکس می تواند با موقعیت خنثی گیربکس از موتور جدا شود.
مزایا و معایب گیربکس دستی
مزایای
- این خودرو برای راننده جذابتر است.
- راننده کنترل کامل روی دنده ها و زمان تعویض دنده ها را دارد.
- هزینه خودروهای دستی کمتر از خودروهای اتوماتیک است.
- هزینه انتقال برای تعمیر کمتر است.
- مسافت پیموده شده بهتری را ارائه می دهد.
معایب
- انتقال دستی در ترافیک سنگین می تواند آزاردهنده باشد.
- ممکن است در یادگیری درایور جدید مشکلاتی ایجاد شود.
- کنترل دقیق تپه ها برای جلوگیری از توقف یا برگشتن ضروری است.
- هنگام استفاده از چرخ دنده و کلاچ ، دست و پا آسیب می بینند.
مزایا و معایب گیربکس اتوماتیک
مزایای
- رانندگی در ترافیک توقف و حرکت آسان است.
- این انتقال سریع و روان است.
- خودروهای اتوماتیک کنونی مسافت پیموده شده مشابه گیربکس دستی را ارائه می دهند.
- گیربکس اتوماتیک هنگام رانندگی برای راننده بسیار راحت است.
معایب
- خرید خودروی گیربکس اتوماتیک گرانتر از خودروی گیربکس دستی است.
- قطعات متحرک بیشتری در گیربکس اتوماتیک وجود دارد که هزینه تعمیر را افزایش می دهد.
- تعویض دنده کمی زمان می برد و تعویض دنده مشخص می شود و در مواقعی یک ضربه کوچک نیز از کار می افتد.
- شما نمی توانید دنده اتوماتیک را بیشتر یا کمتر به میل خود بسازید ، ناگهان مشکلی در سبقت از خودرو ایجاد می شود.
![]()